|
无人驾驶技术剖析 无人驾驶可以广义的定义为,通过计算机、AI等技术实现无人驾驶的智能汽车技术。 美国机动车工程师学会(SAE)和美国高速公路安全管理局(NHTSA)对无人驾驶技术设下了分级标准,我们讨论的无人驾驶更多的是3到5级——由自动驾驶系统执行全部的动态驾驶任务。
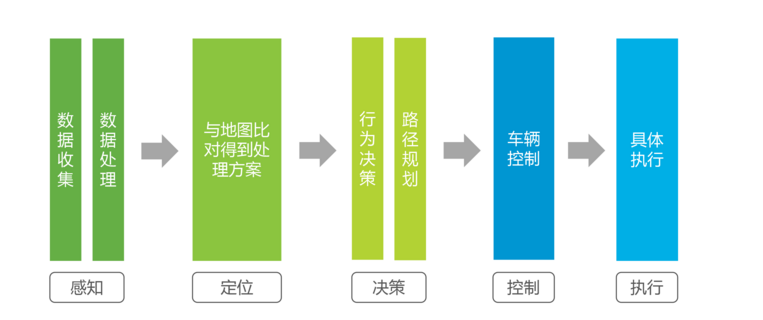
行业中对无人驾驶技术普遍分为5个层级。 感知:通过摄像头、激光、雷达、红外线传感器等,车辆可对周围的静态和动态环境进行360度的精确感知。 定位:包括了地图融合,基于地标或GPS的三角测距,精确的定位是无人驾驶车辆在路上安全形势的重要前提。 决策:制定了车辆前往目的地的运动轨迹和遇到突发事件的行为。 控制:通过车辆的控制系统,实现无人驾驶的智能化驱动。 执行:车辆具体的执行部分。 为了简单形象地展示无人驾驶的技术原理,我们绘制了流程图。
技术原理流程看似简单,但每一项具体的任务都充满了挑战,以视觉传感器为例。 计算机视觉是一门希望通过机器代替人眼,最终超越人眼的独立科学。无人车领域计算机视觉主要运用于最基础的感知层,通过超声波雷达、毫米波雷达、激光雷达和摄像头等传感器,为无人驾驶系统提供车辆周遭三维环境的定量信息。 超声波雷达由于反应速度和分辨率问题主要用于倒车雷达,毫米波雷达和激光雷达承担了主要的中长距测距和环境感知,而摄像头主要用于交通信号灯和其他物体的识别。
各个传感器协同工作,不间断地采集精确数据,这对传感器精度与硬件质量有着不小的考验,技术壁垒的存在虽然拔高了入局的门槛,但也确保了这条能跑独角兽的赛道稳定长久。 |